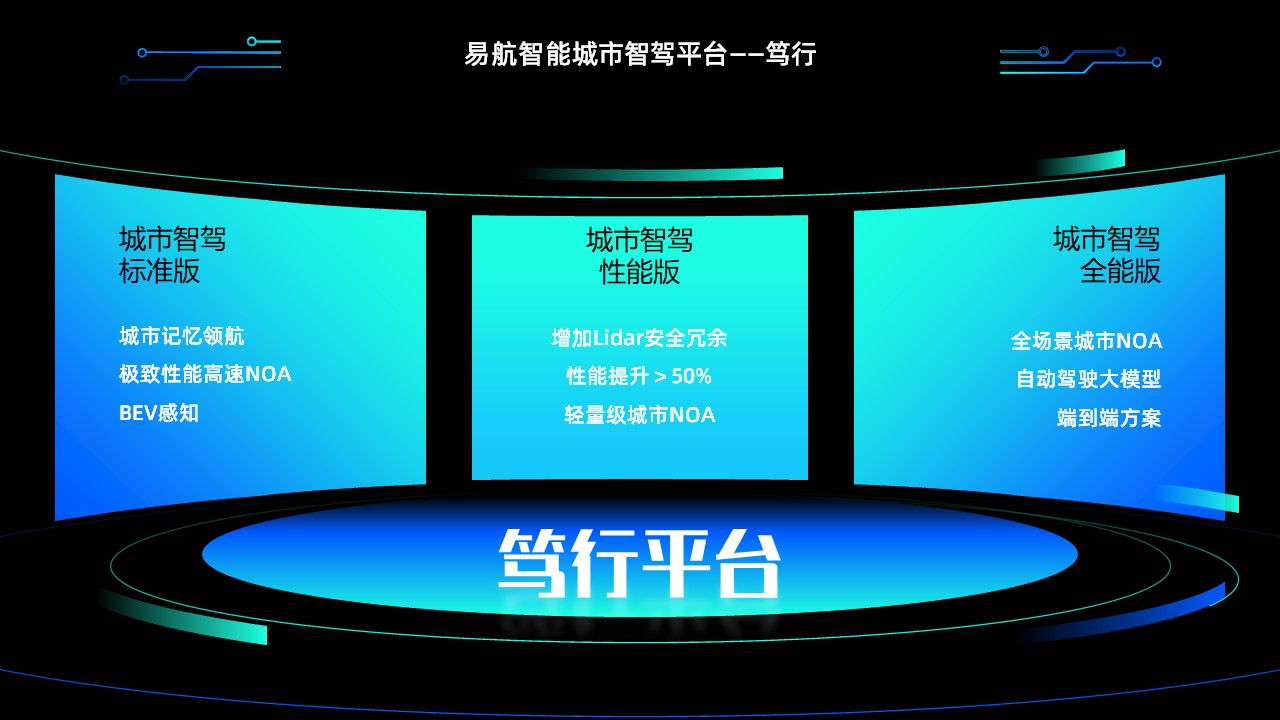
2024北京车展盛大开幕。作为国内自动驾驶量产头部企业,易航智能正式发布“笃行”城市智驾平台,采用量产级BEV“灵眸”,包括城市智驾标准版、城市智驾性能版和城市智驾全能版三款系列方案,其中首推的基于地平线征程6E的城市智驾标准版涵盖极致性能高速NOA、城市记忆领航等高阶智驾功能,整套价格不高于5000元,将为用户提供极具性价比的城市场景智驾方案。
自2022年率先量产NOA行泊一体方案以来,易航智能依托全栈自研技术和丰富的量产经验,持续发力领航辅助驾驶NOA领域,加速迈向城市智驾新场景。在发布会现场,易航智能宣布与行业领先的高效能智能驾驶计算方案提供商地平线达成战略合作,正式加入征程6首批软件算法合作伙伴,双方将携手推动高阶智驾量产迈向新阶段。

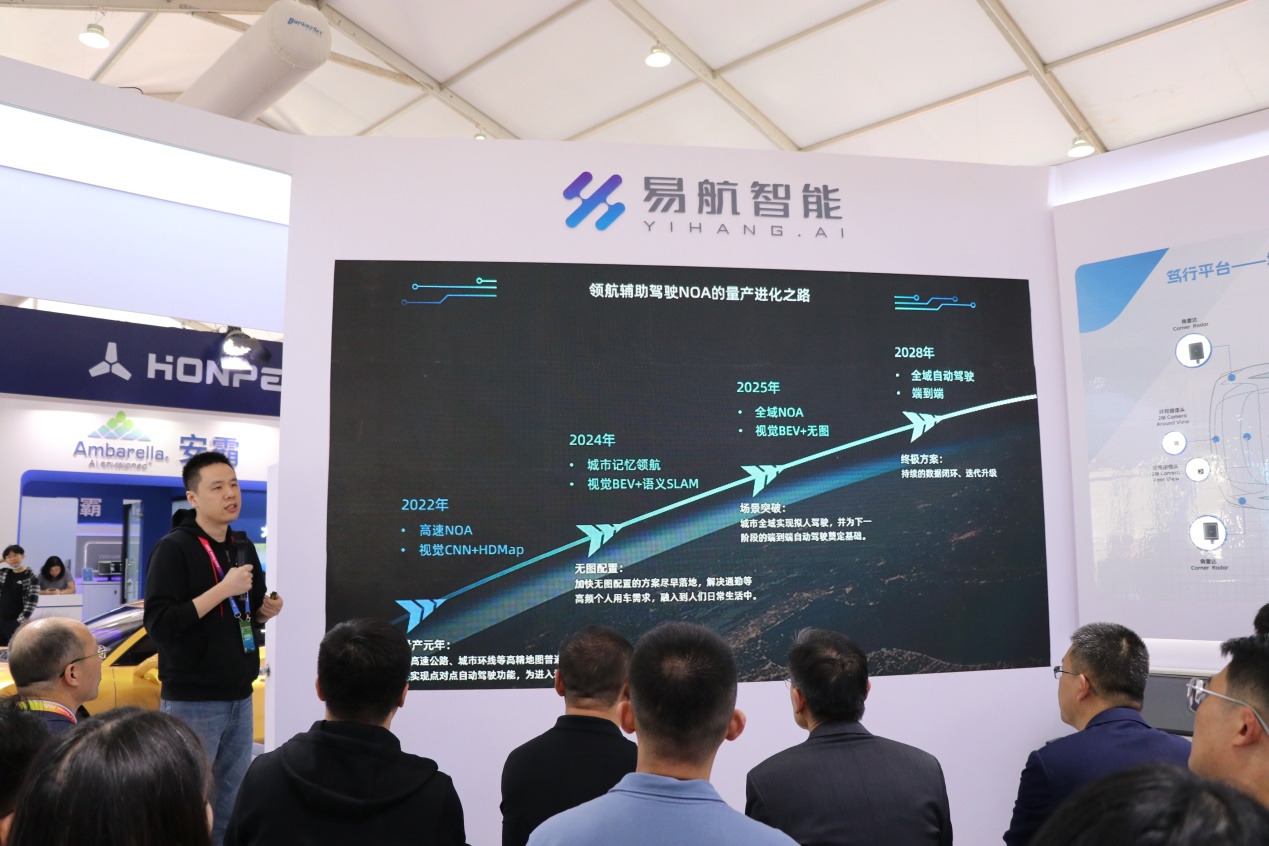
领航辅助驾驶NOA量产进化之路
作为国内最早一批自动驾驶科技公司,易航智能始终坚持以量产为目标,自2015年成立之初就确定了渐进式的发展路径。技术演进至当下,易航智能不仅积累了大量自动驾驶技术的量产经验,更明确了完整的自动驾驶量产路线。
NOA功能是自动驾驶量产路线上的重要节点。NOA出现之前,所有辅助驾驶功能都是碎片化的,而NOA实现了点到点的自动驾驶功能,从而为用户带来了沉浸式驾乘体验。自动驾驶的发展路线就是基于NOA量产计划之路。

2022年,易航智能基于高精地图与视觉卷积神经网络技术,率先量产高速NOA,这一年也普遍被行业视为高速NOA量产元年。在高速NOA的技术基础之上,NOA功能有两大发展方向,其一是拓展高速NOA场景,其二是提升现有高速NOA的产品性能。从这两个方向出发,2024年,易航智能在高速NOA基础上陆续加入城市应用场景,开发了城市记忆领航功能;同时为高速NOA引入BEV算法,以提升高速NOA的感知性能。下一个阶段,随着NOA功能在城市场景中的数据积累和算法迭代,预计将在一至两年内以BEV感知+无图技术方案实现城市NOA,并为之后的端到端自动驾驶奠定基础。
聚焦到当下,通过在高速NOA算法框架基础上添加道路记忆模块,易航智能实现了城市记忆领航功能。其中,新功能算法有超过85%的部分源自高速NOA算法的复用及微调,即量产高速NOA算法就相当于具备了城市智驾的骨干算法。
同时,通过对高速NOA算法的迭代,在通行效率、感知能力、安全等维度实现高速NOA的性能提升,让高速NOA真正实现从可用到好用。例如,通过优化多车道路径规划以及车流监测机制,提升了自动超车并线效率,从而实现了更高的通行效率;通过提高道路边界检测范围,可更精准地识别道路临时施工场景,实现重感知轻地图的技术方案。
清晰的技术路径规划和产品演进步骤,易航智能从量产角度出发,以领航辅助驾驶NOA进化之路展现了其在自动驾驶技术竞争中的核心实力。
量产级BEV灵眸:拓展城市智驾边界
在领航辅助驾驶NOA的量产进化中,易航智能全栈自研的量产级BEV“灵眸”作为“笃行”平台的重要组成部分,肩负着拓展城市智驾边界的重任。
无论是高速NOA,还是城市记忆领航,都是在特定场景下实现的点对点的自动驾驶,无法覆盖整个城市。为了进一步拓展城市智驾场景,需要引入BEV感知算法,而为了推动BEV符合车规级量产条件,就必须结合传统感知算法的核心模块作为补充,实现远焦感知、交通标志识别等必备能力。此外,传统感知算法量产也是BEV量产条件的重要界定,只有量产过传统感知算法才能界定BEV是否达到量产条件。
易航智能是国内少有的自研感知算法至量产的自动驾驶公司,传统多相机融合感知方案可以实现遮挡下的快速识别,精准区分远/中/近距离的高密度目标。而与其感知方案同源的量产级BEV“灵眸”也吸纳了这些优秀能力。当前,“灵眸”已成功移植至征程6E平台,匹配极致性能高速NOA、城市记忆领航等高阶智驾功能,未来还将进一步拓展升级,实现全场景自动驾驶。值得一提的是,部署“灵眸”的地平线征程6E方案还可按照客户需求提供多种配置,兼顾成本和功能双重需求。

面对无人驾驶的终极目标,易航智能从全栈自研入手,以技术为本,围绕核心场景加速推进NOA量产进化,突破智能驾驶行业制高点,致力于成为全球AI智驾方案提供商。
(完)
关于易航智能
易航智能是中国最早一批成立的自动驾驶公司,全栈自研感知、决策、规控等核心算法,提供ADAS、NOA、FSD等解决方案及域控制器、摄像头模组等产品,2016年即拿到首个量产项目,发展至今积累了超5亿公里驾驶数据,主要客户包括理想汽车、北汽集团、上汽大通、洛轲极石、江铃雷诺、一汽大众、威马汽车等主机厂。
易航智能拥有人工智能+车辆工程双基因团队,2021年易航智能自研纯视觉AEB获得C-NCAP & E-NCAP双五星评级,相关车型出口欧洲,覆盖德国、意大利、法国、比利时、西班牙等主要国家;2022年率先在轻量级计算平台量产了NOA行泊一体方案,提供覆盖全国的高速公路、城市环线等场景的点对点自动驾驶功能;2023年获得主机厂城市NOA项目定点,2024年将落地BEV方案。
公司创始人、董事长陈禹行是吉林大学车辆工程专业博士,师从吉林大学郭孔辉院士、UC Berkeley 美国工程院院士J. Karl Hedrick 教授,精通车辆动力学和控制、驾驶员模型和故障诊断。在美就读期间于VDL和MPC实验室负责车辆智能控制项目,在国内负责过多项大型底盘集成控制项目和课题,拥有三十余项发明专利,现任7家国际顶级汽车学术期刊审稿人,发表多篇专业论文。
